|
Geant4.10
|


All Data Structures Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Groups Pages
|
Geant4.10
|
#include <G4USolid.hh>
Protected Member Functions | |
| G4ThreeVectorList * | CreateRotatedVertices (const G4AffineTransform &pT) const |
 Protected Member Functions inherited from G4VSolid Protected Member Functions inherited from G4VSolid | |
| void | CalculateClippedPolygonExtent (G4ThreeVectorList &pPolygon, const G4VoxelLimits &pVoxelLimit, const EAxis pAxis, G4double &pMin, G4double &pMax) const |
| void | ClipCrossSection (G4ThreeVectorList *pVertices, const G4int pSectionIndex, const G4VoxelLimits &pVoxelLimit, const EAxis pAxis, G4double &pMin, G4double &pMax) const |
| void | ClipBetweenSections (G4ThreeVectorList *pVertices, const G4int pSectionIndex, const G4VoxelLimits &pVoxelLimit, const EAxis pAxis, G4double &pMin, G4double &pMax) const |
| void | ClipPolygon (G4ThreeVectorList &pPolygon, const G4VoxelLimits &pVoxelLimit, const EAxis pAxis) const |
| G4double | EstimateCubicVolume (G4int nStat, G4double epsilon) const |
| G4double | EstimateSurfaceArea (G4int nStat, G4double ell) const |
Protected Attributes | |
| VUSolid * | fShape |
| G4Polyhedron * | fPolyhedron |
| Protected Attributes inherited from G4VSolid | |
| G4double | kCarTolerance |
Definition at line 46 of file G4USolid.hh.
Definition at line 44 of file G4USolid.cc.
|
virtual |
Definition at line 54 of file G4USolid.cc.
| G4USolid::G4USolid | ( | __void__ & | a | ) |
Definition at line 49 of file G4USolid.cc.
| G4USolid::G4USolid | ( | const G4USolid & | rhs | ) |
Definition at line 364 of file G4USolid.cc.
References VUSolid::Clone(), and fShape.
|
virtual |
Implements G4VSolid.
Definition at line 175 of file G4USolid.cc.
References G4VSolid::ClipBetweenSections(), G4VSolid::ClipCrossSection(), CreateRotatedVertices(), VUSolid::eXaxis, VUSolid::ExtentAxis(), VUSolid::eYaxis, VUSolid::eZaxis, fShape, G4VoxelLimits::GetMaxExtent(), G4VoxelLimits::GetMaxXExtent(), G4VoxelLimits::GetMaxYExtent(), G4VoxelLimits::GetMaxZExtent(), G4VoxelLimits::GetMinExtent(), G4VoxelLimits::GetMinXExtent(), G4VoxelLimits::GetMinYExtent(), G4VoxelLimits::GetMinZExtent(), Inside(), G4AffineTransform::Inverse(), G4VoxelLimits::IsLimited(), G4AffineTransform::IsRotated(), G4VSolid::kCarTolerance, kOutside, kXAxis, kYAxis, kZAxis, G4INCL::Math::max(), G4INCL::Math::min(), G4AffineTransform::NetTranslation(), G4AffineTransform::TransformPoint(), CLHEP::Hep3Vector::x(), CLHEP::Hep3Vector::y(), and CLHEP::Hep3Vector::z().
Referenced by GetExtent().
|
virtual |
Reimplemented from G4VSolid.
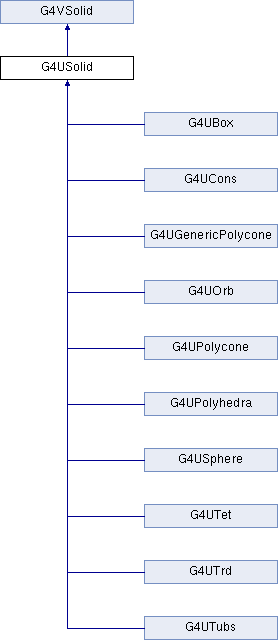
Reimplemented in G4UPolyhedra, G4UPolycone, G4UTubs, G4UCons, G4USphere, G4UTrd, G4UBox, and G4UOrb.
Definition at line 390 of file G4USolid.cc.
References G4endl, G4Exception(), GetEntityType(), and JustWarning.
|
virtual |
Reimplemented from G4VSolid.
Reimplemented in G4UPolyhedra, G4UPolycone, G4UTubs, G4UCons, G4USphere, G4UTrd, G4UBox, and G4UOrb.
Definition at line 330 of file G4USolid.cc.
References FatalException, G4endl, and G4Exception().
|
virtual |
Reimplemented from G4VSolid.
Definition at line 441 of file G4USolid.cc.
References HepPolyhedron::createPolyhedron(), fShape, VUSolid::GetEntityType(), VUSolid::GetParametersList(), and python.hepunit::pi.
Referenced by GetPolyhedron().
|
protected |
Definition at line 401 of file G4USolid.cc.
References VUSolid::eXaxis, VUSolid::ExtentAxis(), VUSolid::eYaxis, VUSolid::eZaxis, FatalException, fShape, G4Exception(), and G4AffineTransform::TransformPoint().
Referenced by CalculateExtent().
|
virtual |
Implements G4VSolid.
Definition at line 341 of file G4USolid.cc.
References G4VGraphicsScene::AddSolid().
|
virtual |
Implements G4VSolid.
Definition at line 91 of file G4USolid.cc.
References VUSolid::DistanceToIn(), fShape, test::v, CLHEP::Hep3Vector::x(), UVector3::x, CLHEP::Hep3Vector::y(), UVector3::y, CLHEP::Hep3Vector::z(), and UVector3::z.
|
virtual |
Implements G4VSolid.
Definition at line 107 of file G4USolid.cc.
References fShape, VUSolid::SafetyFromOutside(), CLHEP::Hep3Vector::x(), UVector3::x, CLHEP::Hep3Vector::y(), UVector3::y, CLHEP::Hep3Vector::z(), and UVector3::z.
|
virtual |
Implements G4VSolid.
Definition at line 118 of file G4USolid.cc.
References VUSolid::DistanceToOut(), fShape, n, CLHEP::Hep3Vector::setX(), CLHEP::Hep3Vector::setY(), CLHEP::Hep3Vector::setZ(), test::v, CLHEP::Hep3Vector::x(), UVector3::x, CLHEP::Hep3Vector::y(), UVector3::y, CLHEP::Hep3Vector::z(), and UVector3::z.
|
virtual |
Implements G4VSolid.
Definition at line 149 of file G4USolid.cc.
References fShape, VUSolid::SafetyFromInside(), CLHEP::Hep3Vector::x(), UVector3::x, CLHEP::Hep3Vector::y(), UVector3::y, CLHEP::Hep3Vector::z(), and UVector3::z.
|
virtual |
Reimplemented from G4VSolid.
Definition at line 158 of file G4USolid.cc.
References VUSolid::Capacity(), and fShape.
|
virtual |
Implements G4VSolid.
Definition at line 346 of file G4USolid.cc.
References fShape, and VUSolid::GetEntityType().
Referenced by Clone().
|
virtual |
Reimplemented from G4VSolid.
Definition at line 554 of file G4USolid.cc.
References CalculateExtent(), kXAxis, kYAxis, kZAxis, G4VisExtent::SetXmax(), G4VisExtent::SetXmin(), G4VisExtent::SetYmax(), G4VisExtent::SetYmin(), G4VisExtent::SetZmax(), and G4VisExtent::SetZmin().
|
virtual |
Reimplemented from G4VSolid.
Definition at line 168 of file G4USolid.cc.
References fShape, VUSolid::GetPointOnSurface(), UVector3::x, UVector3::y, and UVector3::z.
|
virtual |
Reimplemented from G4VSolid.
Definition at line 548 of file G4USolid.cc.
References CreatePolyhedron(), and fPolyhedron.
|
inline |
Definition at line 171 of file G4USolid.hh.
References fShape.
|
virtual |
Reimplemented from G4VSolid.
Definition at line 163 of file G4USolid.cc.
References fShape, and VUSolid::SurfaceArea().
|
virtual |
Implements G4VSolid.
Definition at line 63 of file G4USolid.cc.
References VUSolid::eInside, VUSolid::eSurface, fShape, VUSolid::Inside(), kInside, kOutside, kSurface, CLHEP::Hep3Vector::x(), UVector3::x, CLHEP::Hep3Vector::y(), UVector3::y, CLHEP::Hep3Vector::z(), and UVector3::z.
Referenced by CalculateExtent().
Definition at line 370 of file G4USolid.cc.
References VUSolid::Clone(), fShape, and G4VSolid::operator=().
Referenced by G4UOrb::operator=(), G4UTet::operator=(), G4UGenericPolycone::operator=(), G4UBox::operator=(), G4UTrd::operator=(), G4UTubs::operator=(), G4USphere::operator=(), G4UCons::operator=(), G4UPolycone::operator=(), and G4UPolyhedra::operator=().
Definition at line 58 of file G4USolid.cc.
|
virtual |
Implements G4VSolid.
Definition at line 353 of file G4USolid.cc.
References fShape, and VUSolid::GetName().
|
virtual |
Implements G4VSolid.
Definition at line 80 of file G4USolid.cc.
References fShape, n, VUSolid::Normal(), CLHEP::Hep3Vector::x(), UVector3::x, CLHEP::Hep3Vector::y(), UVector3::y, CLHEP::Hep3Vector::z(), and UVector3::z.
|
mutableprotected |
Definition at line 183 of file G4USolid.hh.
Referenced by GetPolyhedron(), G4UTrd::SetAllParameters(), G4USphere::SetDeltaPhiAngle(), G4UTubs::SetDeltaPhiAngle(), G4UCons::SetDeltaPhiAngle(), G4USphere::SetDeltaThetaAngle(), G4USphere::SetInnerRadius(), G4UTubs::SetInnerRadius(), G4UCons::SetInnerRadiusMinusZ(), G4UCons::SetInnerRadiusPlusZ(), G4UPolycone::SetOriginalParameters(), G4UPolyhedra::SetOriginalParameters(), G4USphere::SetOuterRadius(), G4UTubs::SetOuterRadius(), G4UCons::SetOuterRadiusMinusZ(), G4UCons::SetOuterRadiusPlusZ(), G4UOrb::SetRadius(), G4UTubs::SetStartPhiAngle(), G4UCons::SetStartPhiAngle(), G4USphere::SetStartThetaAngle(), G4UBox::SetXHalfLength(), G4UTrd::SetXHalfLength1(), G4UTrd::SetXHalfLength2(), G4UBox::SetYHalfLength(), G4UTrd::SetYHalfLength1(), G4UTrd::SetYHalfLength2(), G4UBox::SetZHalfLength(), G4UTrd::SetZHalfLength(), G4UTubs::SetZHalfLength(), and G4UCons::SetZHalfLength().
|
protected |
Definition at line 182 of file G4USolid.hh.
Referenced by CalculateExtent(), CreatePolyhedron(), CreateRotatedVertices(), DistanceToIn(), DistanceToOut(), G4USolid(), GetCubicVolume(), GetEntityType(), GetPointOnSurface(), G4UOrb::GetShape(), G4UBox::GetShape(), G4UGenericPolycone::GetShape(), G4UTrd::GetShape(), G4UTet::GetShape(), G4USphere::GetShape(), G4UCons::GetShape(), G4UTubs::GetShape(), G4UPolycone::GetShape(), G4UPolyhedra::GetShape(), GetSolid(), GetSurfaceArea(), Inside(), operator=(), StreamInfo(), and SurfaceNormal().
 1.8.7
1.8.7