ecpi.common.mission.attitude Module¶
Created on 16 mai 2018
@author: Colley Jean-Marc, APC/IN2P3/CNRS
Functions¶
compute_local_frame_on_sphere(p_ptg_radec[, deg]) |
Return base of tangent local frame of unit sphere for |
direlev_to_xyz(p_direlev[, deg]) |
Convert spherical coordinate with CNES convention to unit cartesian vector |
ptgori_to_quaternion(p_ptg_radec, p_ori[, deg]) |
Compute quaternion associated to rotation defined by a pointing direction and orientation |
xyz_to_direlev(p_xyz[, deg]) |
Convert unit cartesian vector in spherical coordinate with CNES convention |
Classes¶
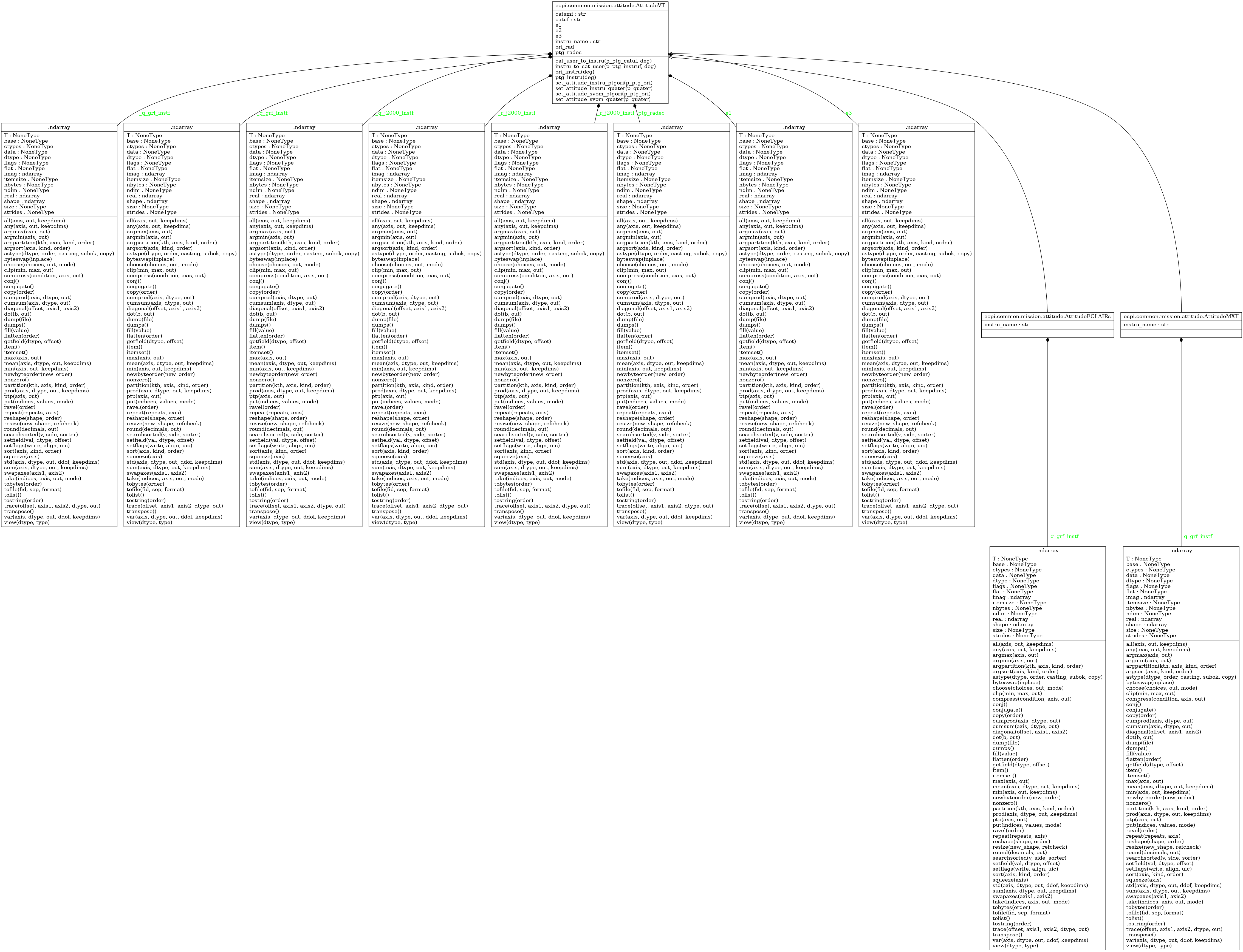
AttitudeECLAIRs([p_frame_cat, no_biais]) |
Attitude for ECLAIRs instrument |
AttitudeMXT([p_frame_cat, no_biais]) |
Attitude for MXT instrument |
AttitudeVT([p_frame_cat, no_biais]) |
Attitude for VT instrument |
Class diagram¶