ecpi.simu.lib.sources module¶
Section author: ECLAIRs GP team
Sources simulation module
Summary¶
Classes:
Base object for the creation of the shadowgram model of different sources |
|
Manage list of point source |
|
model for a flat CXB without spectrum |
|
Model for a geometrically flat CXB with energy dependence as specified with the Moretti spectrum. |
|
Model for a CXB without spectrum based on the pixel solid angle shape |
|
Model for an energy dependent CXB based on the pixel solid angle shape |
|
Model for an energy dependent CXB in the presence of Earth in FOV. |
|
Generic class for flat model |
|
Model for a flat internal noise, impact on detector of particles in the terrestrial environment The internal noise is independent from wavelength |
|
Model for an energy dependent CXB in the presence of Earth in FOV. |
|
Model for an energy dependent CXB in the presence of Earth in FOV. |
|
model for point source |
|
Model for point source. |
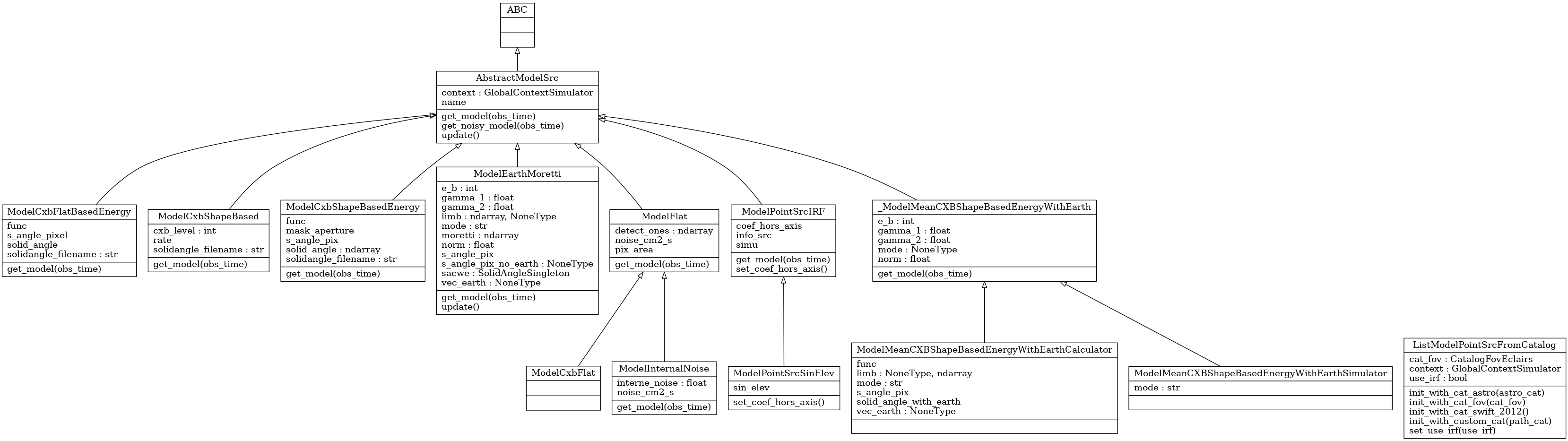
Class diagram:
Reference¶
-
class
AbstractModelSrc[source]¶ Bases:
abc.ABCBase object for the creation of the shadowgram model of different sources
-
abstract
get_model(obs_time=None)[source]¶ return detector image of model of the source
- Parameters
obs_time (float) – observation time in s
- Returns
detector image of model of the source
- Return type
array(80x80) of float
-
get_noisy_model(obs_time=None)[source]¶ Return the shadowgram model with poisson noise.
- Parameters
obs_time (float) – observation time in seconds
-
property
name¶ Get name.
-
abstract
-
class
ListModelPointSrcFromCatalog(use_irf=True)[source]¶ Bases:
objectManage list of point source
-
init_with_cat_astro(astro_cat)[source]¶ return a list of ShadowModelPointSrcSinElev from a catalog
attitude used to define fov
- Parameters
astro_cat – table with intensoty column
-
init_with_cat_fov(cat_fov)[source]¶ Initialize catalog with sources in FOV.
- Parameters
cat_fov (CatalogFovEclairs object) – source catalog.
- Returns
sources infos
- Return type
dict
-
init_with_cat_swift_2012()[source]¶ return a list of ShadowModelPointSrcSinElev from the SWIFT/BAT catalog attitude used to define fov
-
-
class
ModelCxbFlat(cxb_level=1)[source]¶ Bases:
ecpi.simu.lib.sources.ModelFlatmodel for a flat CXB without spectrum
-
class
ModelCxbFlatBasedEnergy(solidangle_filename='__to_remove__')[source]¶ Bases:
ecpi.simu.lib.sources.AbstractModelSrcModel for a geometrically flat CXB with energy dependence as specified with the Moretti spectrum.
-
class
ModelCxbShapeBased(cxb_level=3035, solidangle_filename='__to_remove__')[source]¶ Bases:
ecpi.simu.lib.sources.AbstractModelSrcModel for a CXB without spectrum based on the pixel solid angle shape
..warning :: dead code ?
-
class
ModelCxbShapeBasedEnergy(solidangle_filename='__to_remove__')[source]¶ Bases:
ecpi.simu.lib.sources.AbstractModelSrcModel for an energy dependent CXB based on the pixel solid angle shape
-
get_model(obs_time=None)[source]¶ return the shadowgram model
..note: RMF must be handled here at some point ! ..note: doc to Moretti’s model: flux = integral between e_min and e_max of eq. 4 of https://arxiv.org/pdf/0811.1444.pdf
- Parameters
obs_time (float) – observation time in s
- Returns
cxb detector image in ph/pix
- Return type
array(float)
-
-
class
ModelEarthMoretti(limb=None, vec_earth=None)[source]¶ Bases:
ecpi.simu.lib.sources.AbstractModelSrcModel for an energy dependent CXB in the presence of Earth in FOV. CXB model is computed with mean shape.
-
get_model(obs_time=None)[source]¶ Return the shadowgram model.
- Parameters
obs_time (float) – observation time in s
- Returns
shadowgram
- Return type
2D array(float) with shape 80x80
-
update()[source]¶ constructor
- Parameters
limb (float) – limb angle in degree
vec_earth (list/array of size 3) – earth direction unit vector
use_numba – whether or not to use pre-compiled function
when computing solid angle. Default is True. :type use_numba: bool
..note: sum of solid angle with real mask accounts for cos theta
-
-
class
ModelFlat(level)[source]¶ Bases:
ecpi.simu.lib.sources.AbstractModelSrcGeneric class for flat model
-
class
ModelInternalNoise(noise_level=0.003)[source]¶ Bases:
ecpi.simu.lib.sources.ModelFlatModel for a flat internal noise, impact on detector of particles in the terrestrial environment The internal noise is independent from wavelength
-
class
ModelMeanCXBShapeBasedEnergyWithEarthCalculator(limb=None, vec_earth=None, use_numba=True)[source]¶ Bases:
ecpi.simu.lib.sources._ModelMeanCXBShapeBasedEnergyWithEarthModel for an energy dependent CXB in the presence of Earth in FOV. CXB model is computed with mean shape.
-
class
ModelMeanCXBShapeBasedEnergyWithEarthSimulator[source]¶ Bases:
ecpi.simu.lib.sources._ModelMeanCXBShapeBasedEnergyWithEarthModel for an energy dependent CXB in the presence of Earth in FOV. CXB model is computed with a ray-tracing method.
-
class
ModelPointSrcIRF(info_src)[source]¶ Bases:
ecpi.simu.lib.sources.AbstractModelSrcmodel for point source
-
S_cpt= 0¶
-
-
class
ModelPointSrcSinElev(info_src)[source]¶ Bases:
ecpi.simu.lib.sources.ModelPointSrcIRFModel for point source. Elevation angle is in degree.